

Software Progress - 2/2/22
- Charles McCampbell-Hill
- Feb 2, 2022
- 1 min read

Updated: Feb 24, 2022
"If dangerous ideas didn’t excite the imagination, we would never wander astray." - Jayce Talis
As we progress deeper into Senior Design 2 we have made many discoveries on what is involved in making an autonomous rover. I certainly had no idea what is involved with the software end of autonomous vehicles when I decided to select this as my senior design project. I have found myself in a wonderful position, making new discoveries everyday and putting this progress towards our final result of a rover.
The first bit of progress to be made was to decide how we can simulate a rover in a 3d world. We came upon the realization that Gazebo is a powerful visualization tool, and can be used to easily demonstrate the capabilities of our rover even if we don't have a physical one in hand. The first major step was getting a 4 wheeled robot similar in proportions to ours loaded into a blank Gazebo world.
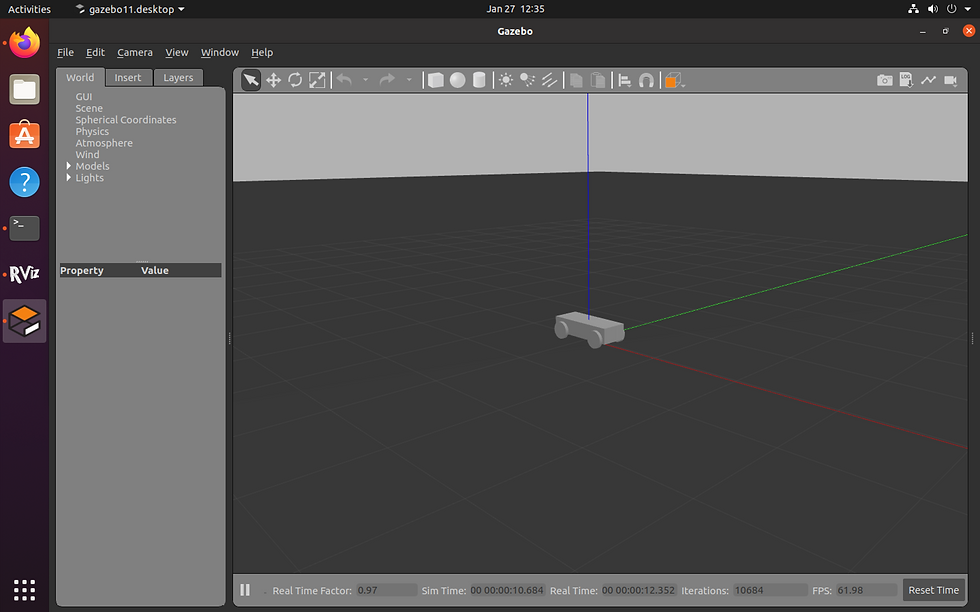
Seeing this ugly brick of a robot loaded into the 3d world lit up a smile brighter than when I barely passed high school geometry. Now that we know we are capable of loading a urdf of our robot into the 3d world, now we must get it to move. This process begun recently, and as with all software applications, has come with its fair share of headaches.
I don't even know what this means.
As we continue forward I am glad to be working with a wonderful team of bright, hardworking individuals. I'm sure we will end strong in Senior Design.
- Charles McCampbell-Hill


Comments